Arduino Projects: Nicla Vision and Snake Robot
-
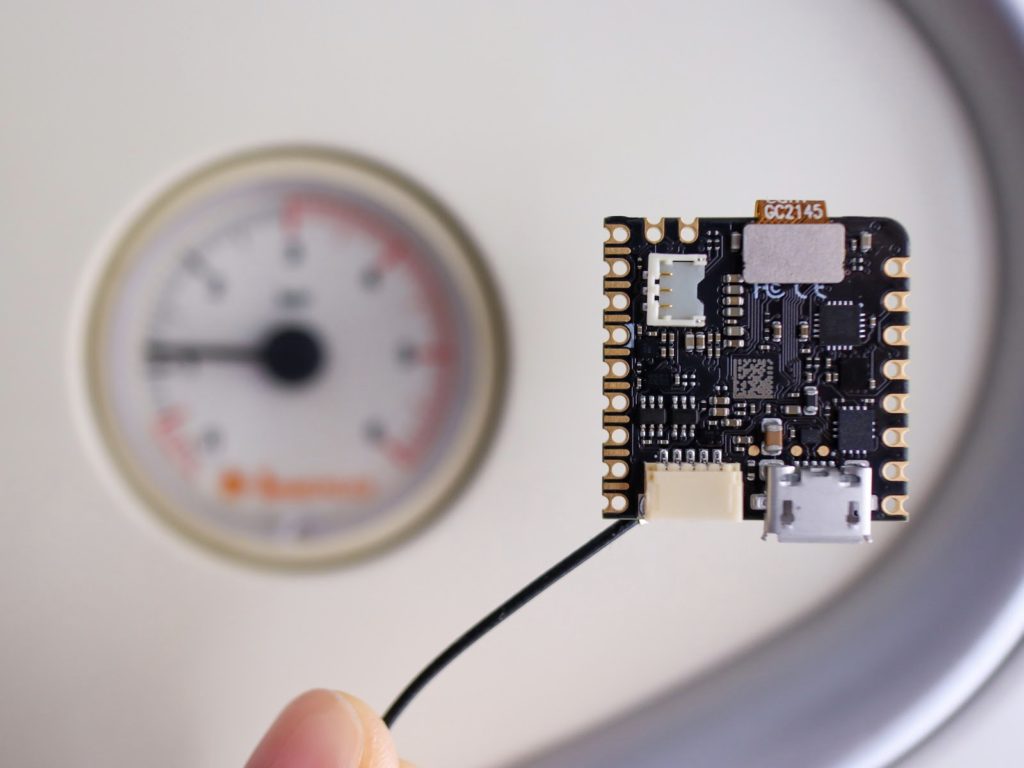
Reading analog gauges with the Nicla Vision | Arduino Blog
Analog instruments are everywhere and used to measure pressure, temperature, power levels, and much more. Due to the advent of digital sensors, many of these became quickly obsolete, leaving the remaining ones to require either conversions to a digital format or frequent human monitoring. However, the Zalmotek team has come up with a solution that incorporates embedded machine learning and computer vision in order to autonomously read these values.
Mounted inside of a custom enclosure, their project relies on an Arduino Pro Nicla Vision board, which takes periodic images for further processing and inference. They began by generating a series of synthetic gauge pictures that have the dial at various positions, and labeled them either low, normal, or high. This collection was then imported into the Edge Impulse Studio and used to train a machine learning model on the 96x96px samples due to the limited memory. Once created, the neural network could successfully determine the gauge’s state about 92% of the time.
-
This snake robot is large enough to ride upon | Arduino Blog
If a robot is rideable, is it still a robot or is it a vehicle? We would argue that if it rolls on standard automobile-style wheels or even tank tracks, it is a vehicle. But James Bruton’s eight-wheeled robot snake bike is quite clearly something else. This “vehicle” started as a small functional model that everyone would call a robot. Now Bruton has finished the full-size rideable snake robot and it is something to behold.
The robot consists of four caterpillar-like segments, each with a pair of wheels. Two of the segments have driven wheels, while the other two segments have free wheels. Each segment is able to pivot relative to its neighbor and can also tilt up/down. There are two reasons for the tilt actuation. The first is to compensate for the rider’s weight in order to keep all of the wheels on the ground. The second reason is to handle bumps and uneven terrain, similar to a car’s suspension. The rider sits on a motorcycle seat mounted to the third segment (which is driven), so their weight is roughly centered.